Time Synchronization
This topic introduces the time synchronization mechanism in Milvus.
Overview
The events in Milvus can be generally categorized in to two types:
Data definition language (DDL) events: create/drop a collection, create/drop a partition, etc.
Data manipulation language (DML) events: insert, search, etc.
Any event, no matter it is DDL or DML event, is marked with a timestamp that can indicate when this event occurs.
Suppose there are two users who initiate a series of DML and DDL events in Milvus in the time order shown in the following table.
| Timestamp | User 1 | User 2 |
|---|---|---|
| t0 | Created a collection named C0. | / |
| t2 | / | Conducted a search on collection C0. |
| t5 | Inserted data A1 into collection C0. | / |
| t7 | / | Conducted a search on collection C0. |
| t10 | Inserted data A2 into collection C0. | / |
| t12 | / | Conducted a search on collection C0 |
| t15 | Deleted data A1 from collection C0. | / |
| t17 | / | Conducted a search on collection C0 |
Ideally, user 2 should be able to see:
An empty collection
C0att2.Data
A1att7.Both data
A1andA2att12.Only data
A2att17(as dataA1has been deleted from the collection before this point).
This ideal scenario can be easily achieved when there is only one single node. However, Milvus is a distributed vector database, and to ensure all DML and DDL operations in different nodes are kept in order, Milvus needs to address the following two issues:
The time clock is different for the two users in the example above if they are on different nodes. For instance, if user 2 is 24 hours behind user 1, all operations by user 1 are not visible to user 2 until the next day.
There can be network latency. If user 2 conducts a search on collection
C0att17, Milvus should be able to guarantee that all the operations beforet17are successfully processed and completed. If the delete operation att15is delayed due to network latency, it is very likely that user 2 can still see the supposedly deleted dataA1when conducting a search att17.
Therefore, Milvus adopts a time synchronization system (timetick) to solve the issues.
Timestamp oracle (TSO)
To solve the first issue mentioned in the previous section, Milvus, like other distributed systems, provides a timestamp oracle (TSO) service. This means that all events in Milvus must be allocated with a timestamp from TSO rather than from the local clock.
The TSO service is provided by the root coordinator in Milvus. Clients can allocate one or more timestamps in a single timestamp allocation request.
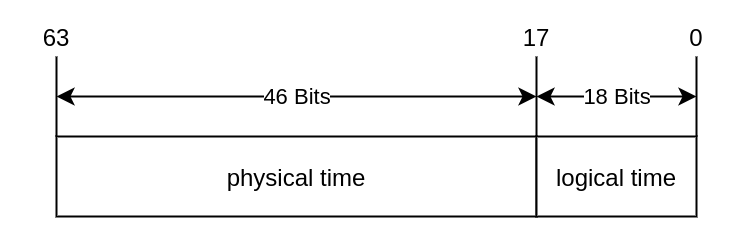
A TSO timestamp is a type of uint64 value that is made up of a physical part and a logical part. The figure below demonstrates the format of a timestamp.
 TSO_Timestamp
.
TSO_Timestamp
.
As illustrated, the 46 bits at the beginning is the physical part, namely the UTC time in milliseconds. The last 18 bits is the logical part.
Time synchronization system (timetick)
This section uses the example of a data insertion operation to explain the time synchronization mechanism in Milvus.
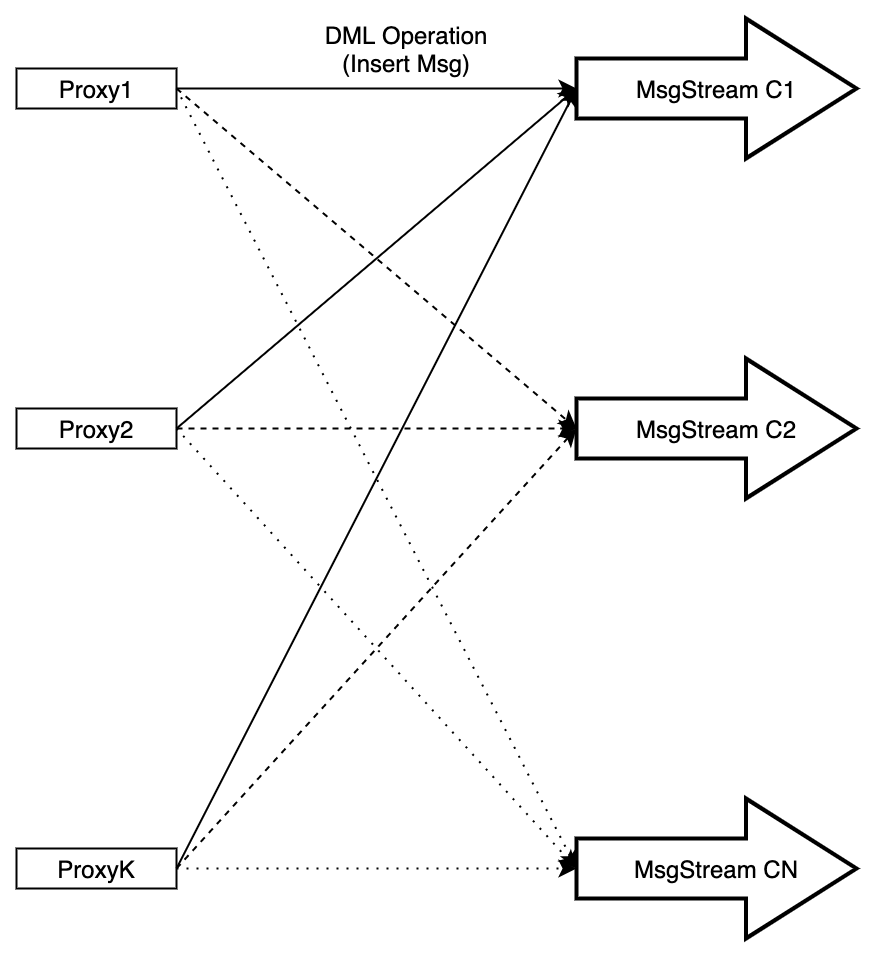
When proxy receives a data insertion request from SDK, it divides the insert messages into different message streams (MsgStream) according to the hash value of the primary keys.
Each insert message (InsertMsg) is assigned a timestamp before being sent to the MsgStream.
MsgStream is a wrapper of the message queue, which is Pulsar by default in Milvus 2.0.
 timesync_proxy_insert_msg
timesync_proxy_insert_msg
One general principle is that in the MsgStream, the timestamps of theInsertMsgs from the same proxy must be incremental. However, there is no such rule for those of the InsertMsgs from different proxies.
The following figure is an example of InsertMsgs in a MsgStream. The snippet contains five InsertMsgs, three of which are from Proxy1 and the rest from Proxy2.
 msgstream
msgstream
The timestamps of the three InsertMsgs from Proxy1 are incremental, and so are the two InsertMsgs from Proxy2. However, there is no particular order among Proxy1 and Proxy2 InsertMsgs .
One possible scenario is that when reading a message with timestamp 110 from Proxy2, Milvus finds that the message with timestamp 80 from Proxy1 is still in the MsgStream. Therefore, Milvus introduces a time synchronization system, timetick, to ensure that when reading a message from MsgStream, all messages with smaller timestamp values must be consumed.
 time_synchronization
time_synchronization
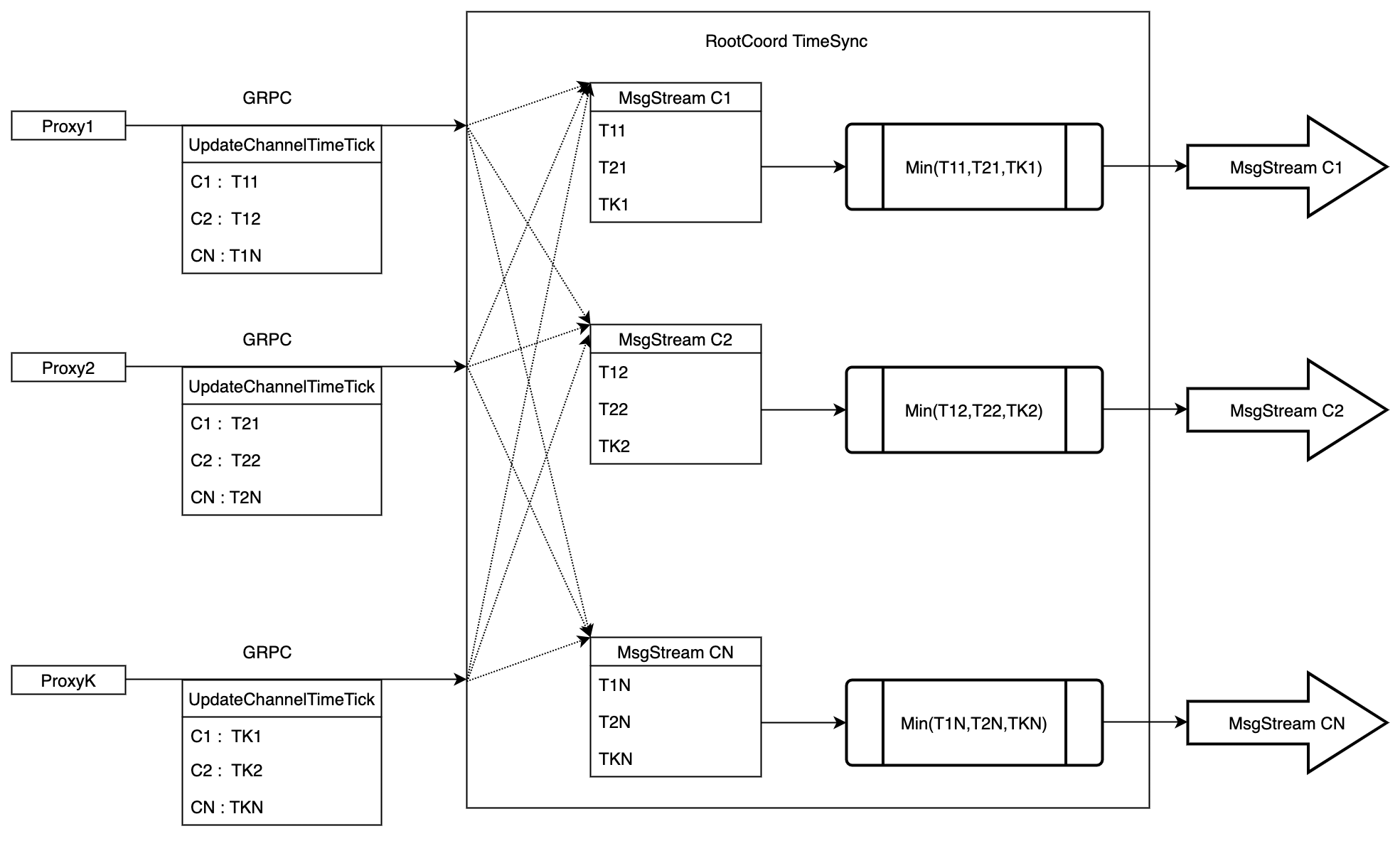
As shown in the figure above,
Each proxy periodically (every 200 ms by default) reports the largest timestamp value of the latest
InsertMsgin theMsgStreamto root coord.Root coord identifies the minimum timestamp value on this
Msgstream, no matter to which proxy does theInsertMsgsbelong. Then root coord inserts this minimum timestamp into theMsgstream. This timestamp is also called timetick.When the consumer components reads the timetick inserted by root coord, they understand that all insert messages with smaller timestamp values have been consumed. Therefore, relevant requests can be executed safely without interrupting the order.
The following figure is an example of the Msgstream with a timetick inserted.
 timetick
timetick
MsgStream processes the messages in batches according to the time tick to ensure that the output messages meet the requirements of timestamp.
What’s next
- Learn about the concept of timestamp.
- Learn about the data processing workflow in Milvus.